
基于stm32的体感遥控小车
第一章 项目概述
项目简介
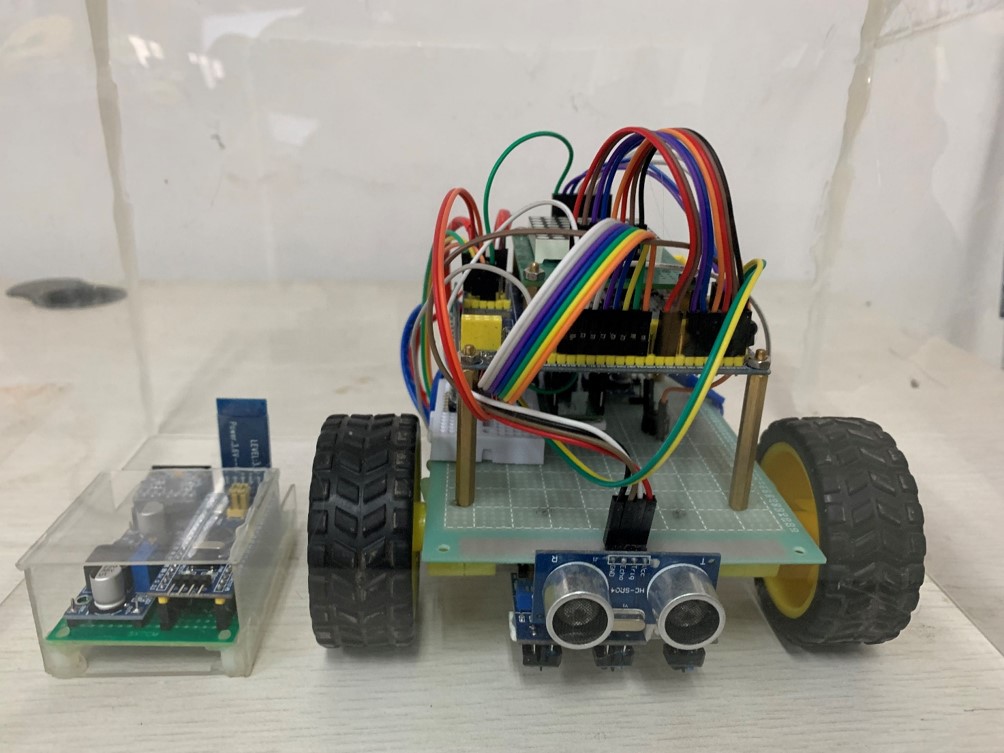
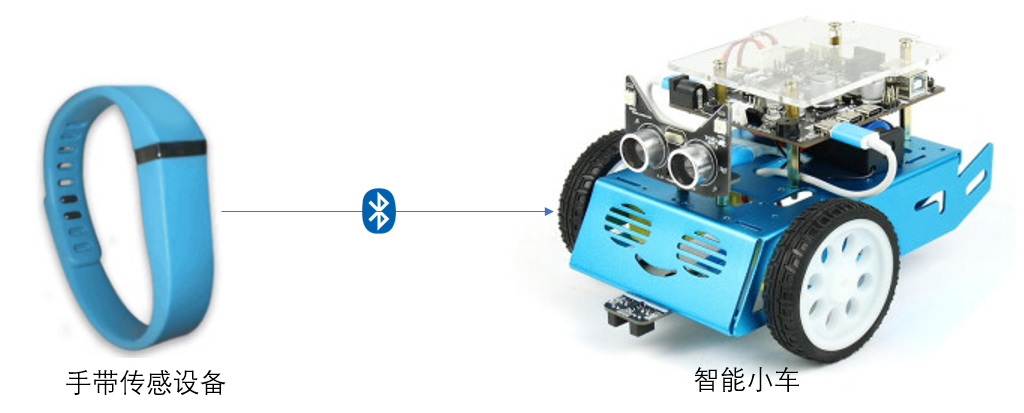
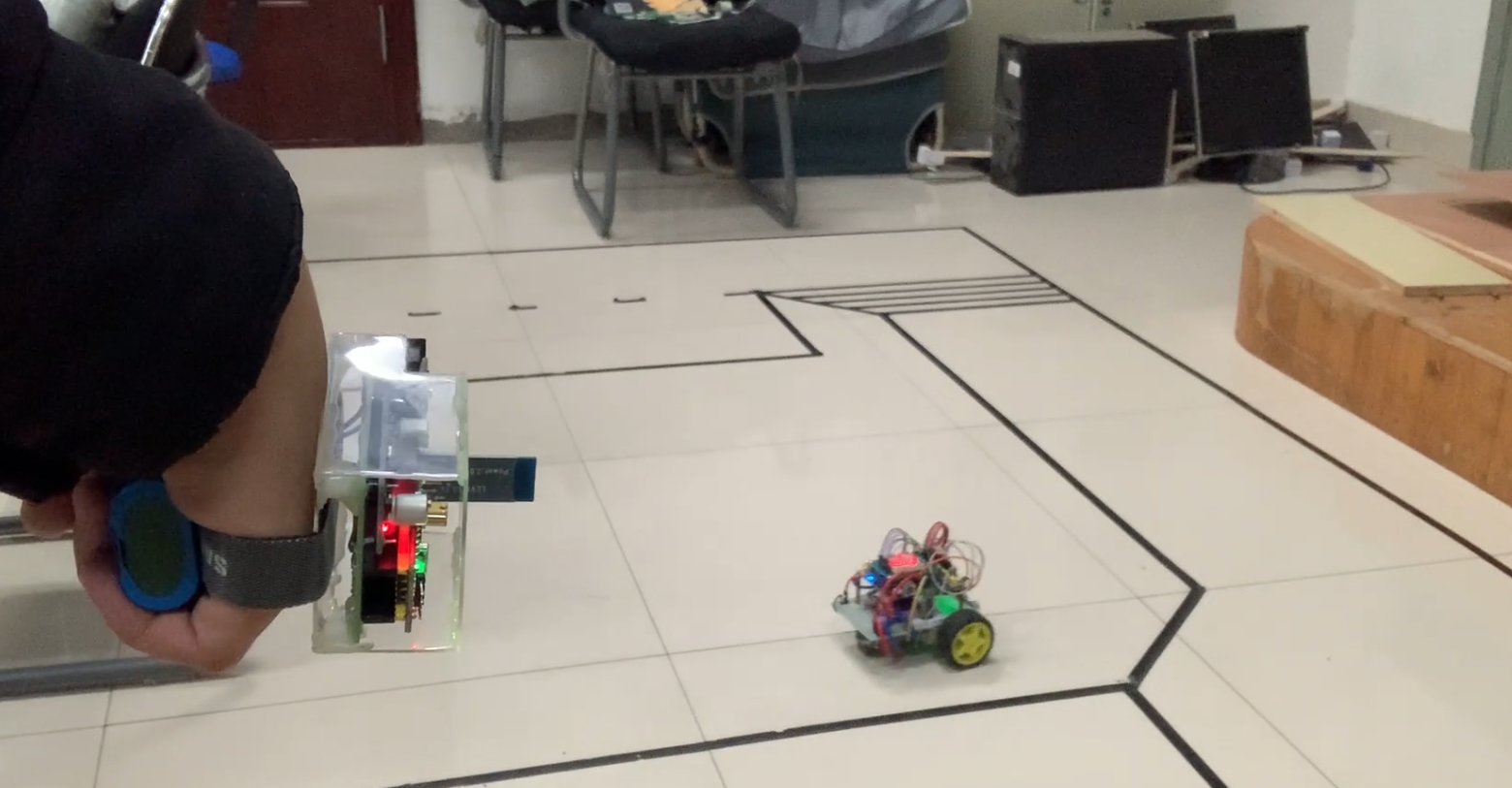
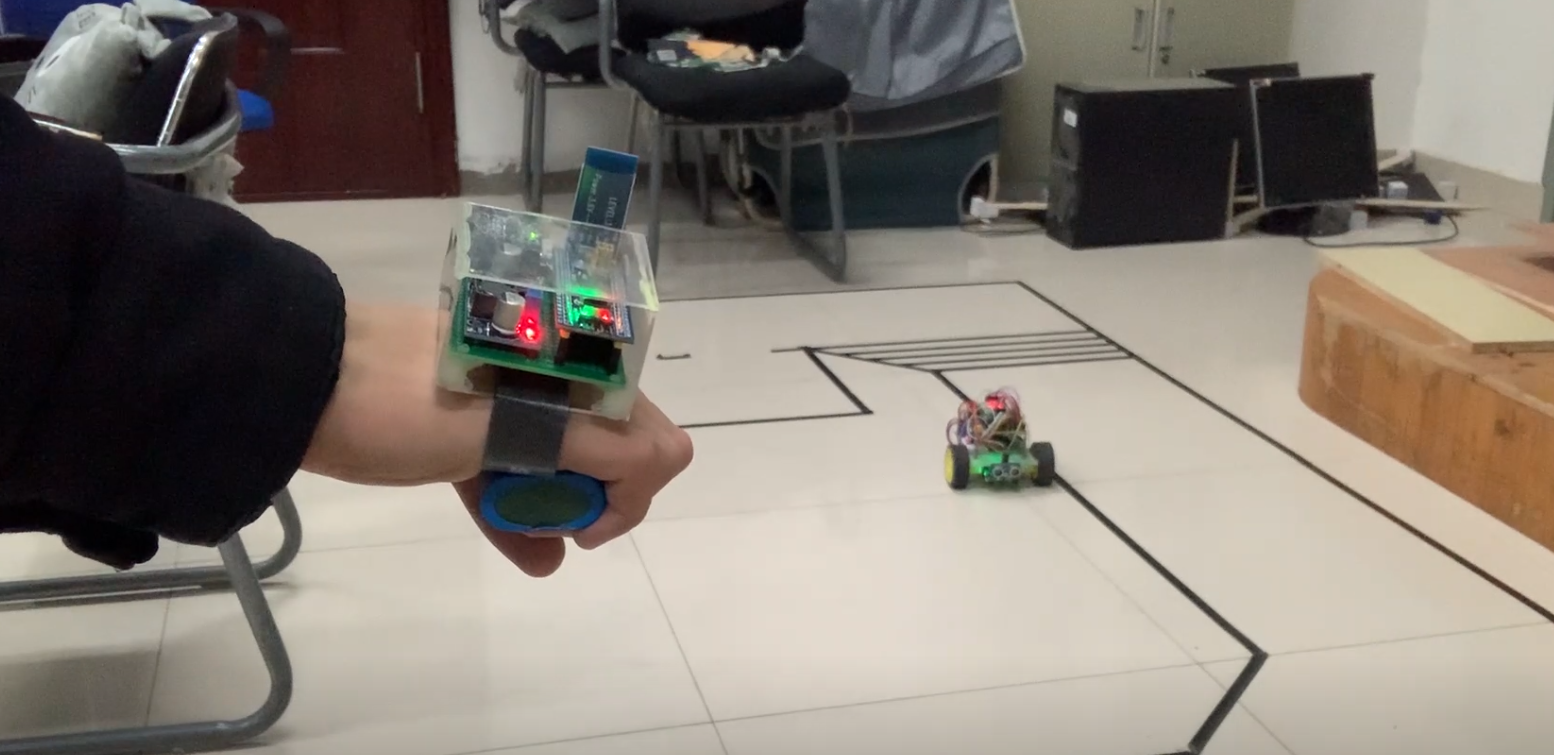
手势识别小车是一款基于STM32开发的智能设备,集成了嵌入式系统和智能手带设备的可靠、高效、便捷的优势。项目由两大部分组成。智能小车和手带设备,可以使用手带设备转角的变化控制智能小车的直行与转向。
项目背景
当今社会,嵌入式产品已经渗透到我们生活的各个领域,几乎很难找到哪个领域没有它足迹。如智能仪表、实时工控、通讯设备、导航系统、家用电器等,这些都是较为常见的嵌入式系统应用。
嵌入式系统是以应用为中心,以计算机技术为基础,适用于应用系统对功能、可靠性、成本、体积和功耗有严格要求的专用计算机系统。相比通用计算机专门化,具有针对性的设计、合理的运算速度、高可靠性和较低的成本。因此嵌入式的学习、开发与应用将造就一批计算机应用与智能化控制的工程师和专家。因此为了跟随时代发展,我们有必要做的与时俱进。
来自国外权威机构IDC的数据显示,2012-2017年全球可穿戴设备的出货量不断增加,2015年以前出货量年均增速均在150%以上,实现较大规模的增加。2015年以后随着市场相对成熟的发展,全球可穿戴设备的出货量增速下降,但至2017年其出货量仍为11540万部,较上年同期同比增加12.70%,2018年截至至第二季度,全球可穿戴设备的出货量为8040万部,在可穿戴设备产品认可度不断提升的影响下,预计全年全球设备的出货量约增加至12.26亿部,较2017年同比增加6.24%。
应用前景
随着5G时代的到来,嵌入式、物联网在人们日常中的应用会更加广泛。并且随着智能穿戴设备普及,已逐渐开始向社会服务、医疗、娱乐等多个领取发展。本项目设计的手势识别小车可以加深对嵌入式系统的理解,为后续项目实践奠定基础。
第二章 系统方案
本项目使用一块手带设备控制小车的行走,因此该项目需要两块主控,一个用于获取手势数据,另一个则用于控制小车。对于手带设备要求必须小巧、稳定,因此采用STM32F103C8T6作为主控,获取手势数据并进行相应处理。小车的功能较多,从而需要相对多的引脚,本次采用STM32F103RCT6作为小车的主控,控制小车行走以及人机交互。
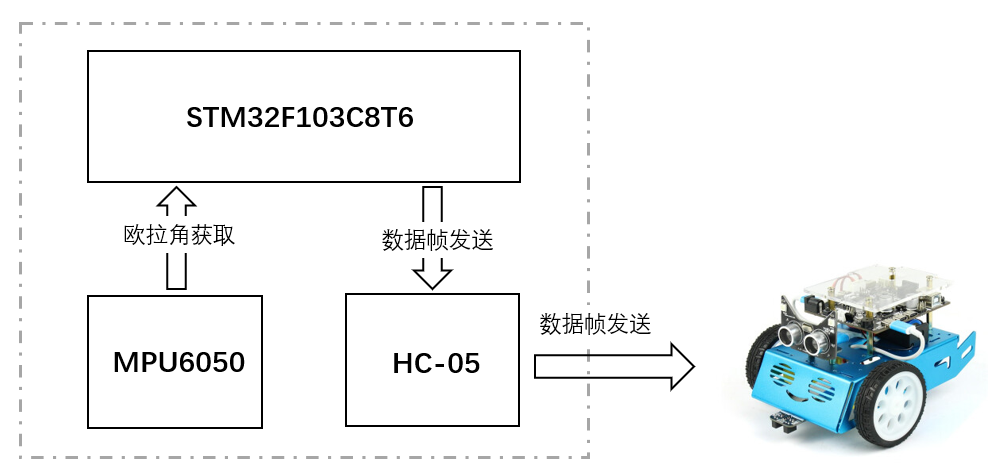
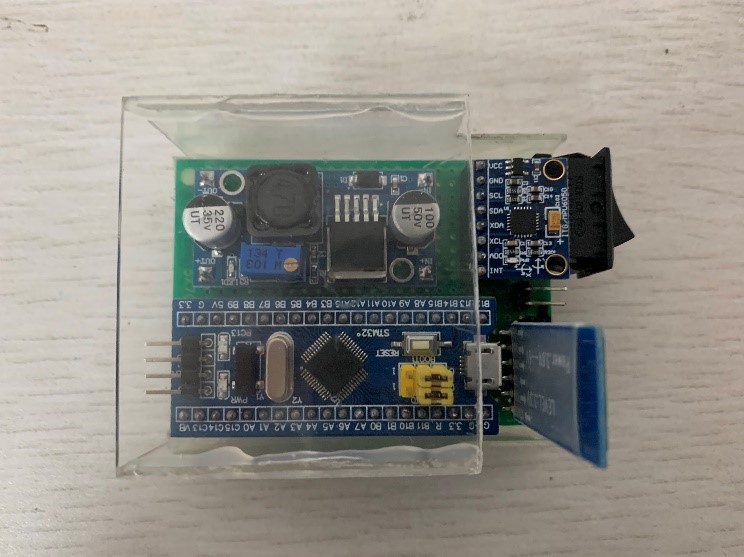
手带设备主要由STM32F103CT86最小系统板、MPU6050三维角度加速度陀螺仪传感器、HC-05蓝牙模块、降压模块组成。最小系统板可以读取MPU6050经DMP姿态解算后的欧拉角数据,将其以数据帧的形式通过HC-05发送给小车。
小车架构
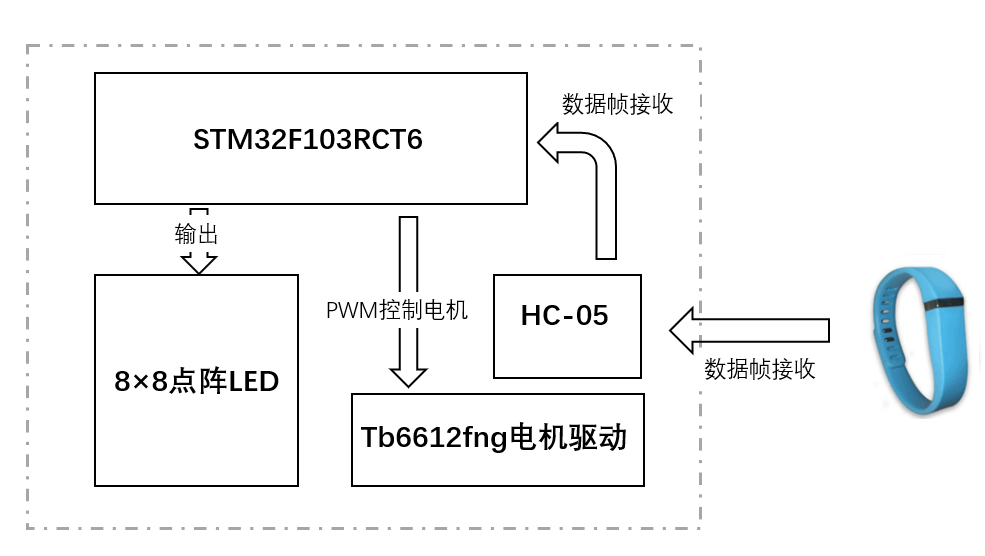
STM32小车主要由一个STM32F103RCT6作为主控,并使用两个直流电机作为动力。人机交互使用一块8×8点阵LED模块,用于显示当前小车的行驶状态。小车接收到手带设备发送的数据帧后进行解析,得到欧拉角从而控制小车的行驶。
软件架构
该项目的软件架构由手带设备和单片机小车两部分组成。手带设备则主要使用MPU6050获取数据并进行姿态解算。单片机小车则需要完成小车的行驶、人机交互。该系统软件架构如图2-4所示。
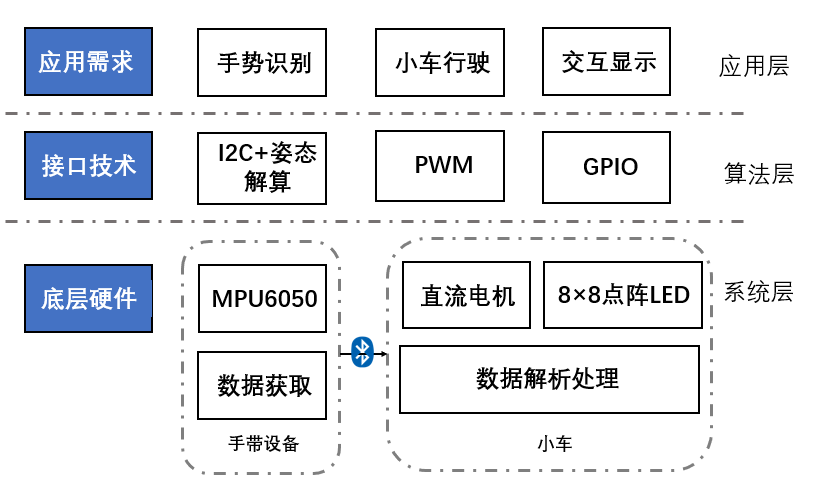
系统软件架构
第三章 系统硬件设计
手带设备
STM32F103C8T6最小系统板
最小系统为能够使单片机能够正常运行,且必须使用最少必须器件组成的系统。一般单片机最小系统上电之后,单片机可以正常复位、下载运行程序,除此之外没有任何功能。因此一般我们可以在最小系统板的基础上添加其它功能模块或器件,使单片机具有实际功能。本次项目手带设备只需要进行数据读取以及发送即可,并不需要多余的外设,因此使用C8T6型号的最小系统板完全能够满足需求。最小系统板的价格相对低廉,大大降低了该项目开发成本。
MPU6050模块
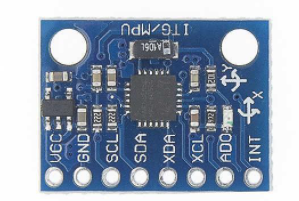
MPU-60X0将3轴陀螺仪,3轴加速度计和数字运动处理器(DMP)组合在一起。通过I2C总线可以接受外部3轴罗盘的输入,提供9轴输出。MPU-60X0具有三个用于数字化陀螺仪输出的16位ADC转换器和三个用于数字化加速度计输出的16位ADC转换器。在本项目中该模块是手带设备的核心,STM32最小系统板获取MPU6050经过DMP姿态解算后的欧拉角作为小车行驶的依据。

LM2596S降压模块

电源模块采用7.4V可充电锂电池作为主要供电,开发板电压需要在5V以下,所以需要使用LM2596S模块进行降压处理.,该模块顺时针调节升压,逆时针调节降压。
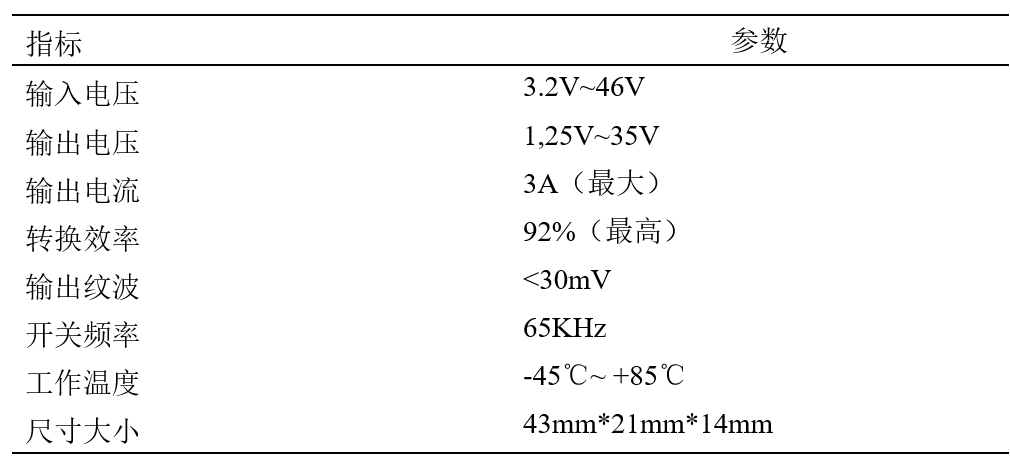
由于开发板支持5V电压输入,需要将电压降至不大于5V。输入电压可以为3.2至35V,输出电压1.25至30V,注意输入电压需高于输出电压1.5V,不可用于升压。顺时针调节升压,逆时针调节降压。
HC-05蓝牙模块
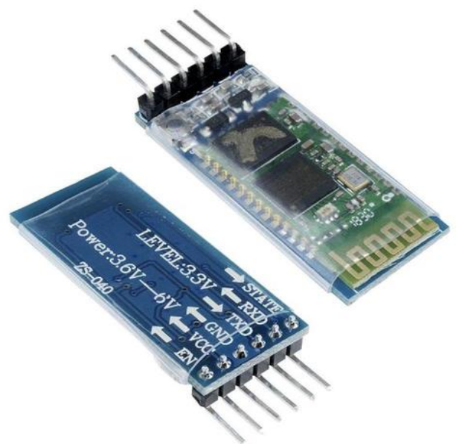
HC-05蓝牙模块是主从一体的蓝牙串口模块,通常当蓝牙设备配对连接成功后,我们可忽略蓝牙内部的通信协议,直接把蓝牙当做串口使用。建立连接后,两个设备共同使用一个串口,一个设备发送数据到通道中,另一个设备便可以接受通道中的数据。
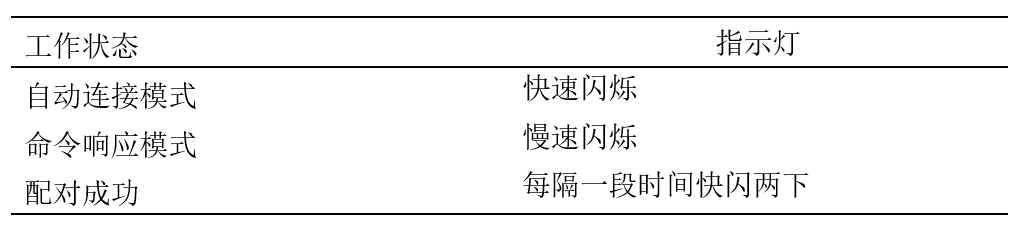
该蓝牙模块具有两种工作模式:命令响应工作模式和自动连接工作模式,在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;当模块处于命令响应工作模式时能执行下述所有 AT 命令,用户可向模块发送各种 AT 指令,为模块设定控制参数或发布控制命令。通过控制模块外部按键,可以实现模块工作状态的动态转换。其中LED的闪烁状态代表这蓝牙模块当前工作状态。
智能小车
STM32F103RCT6开发板
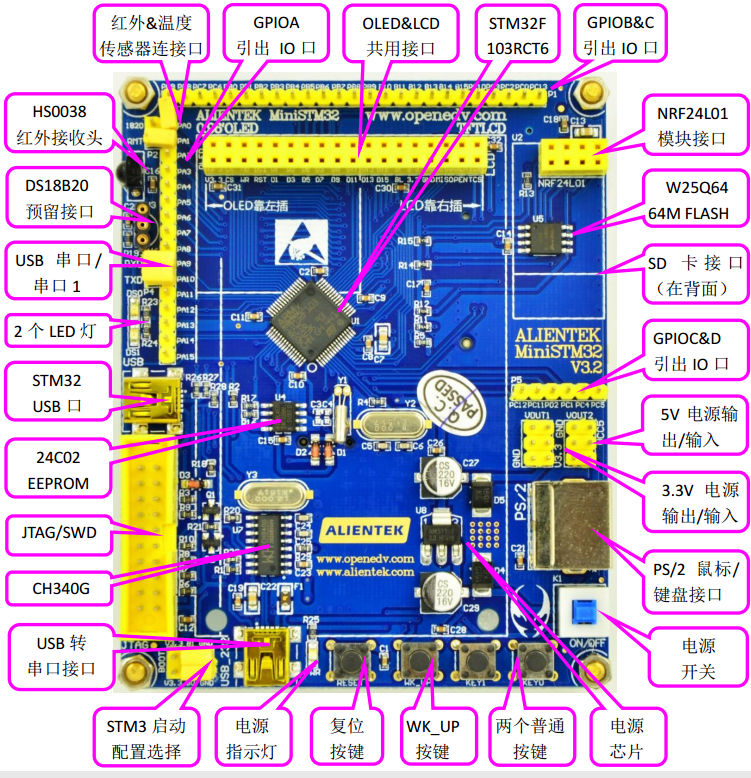
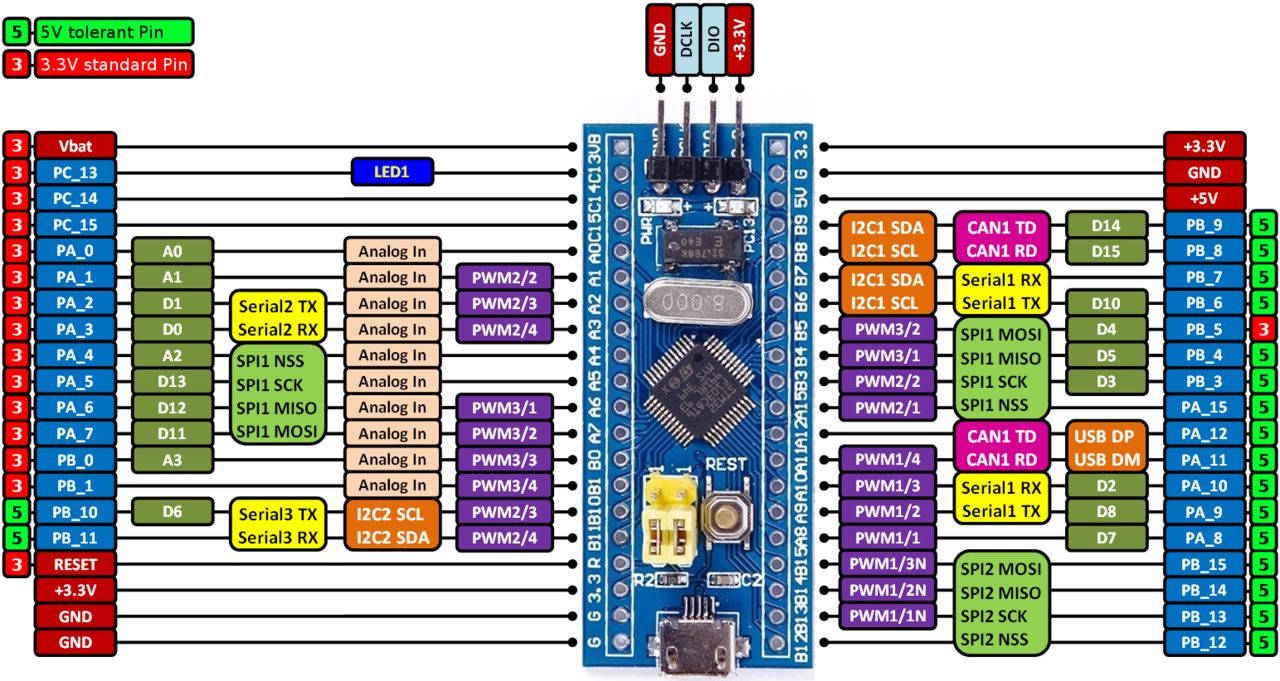
本次智能小车使用ALIENYEK MiniSTM32开发板作为主控板,主芯片为STM32F103RCT6(64)引脚,芯片FLASH:256K,芯片SRAM:48K,板内软、硬件资源丰富、操作简单。从成本、复杂程度综合进行考量,使用该开发板制作智能小车是不错的选择。
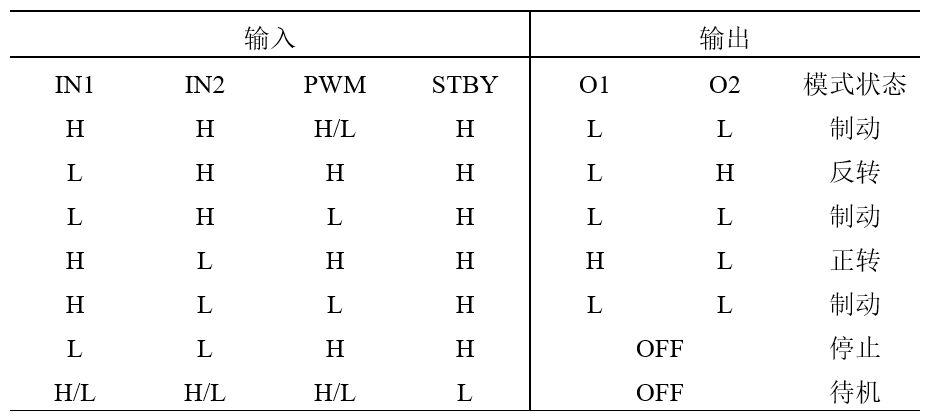
TB6612FNG

TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机。TB6612FNG每通道输出高1A的连续驱动电流,启动峰值电流达2A/3A(连续脉冲/单脉冲)。
4种电机驱动模式:正转/反转/制动/停止。PWM支持频率高达100kHz,待机状态。片内低电压检测电路与热停机保护电路。
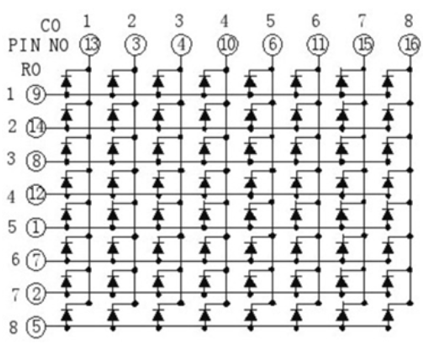
8X8点阵LED
本次项目中智能小车部分将使用8*8点阵LED作为显示模块,根据小车的行驶状态会有相应的图案显示。使用的共阳点阵LED模块的原理如图3-7所示。
第四章 系统软件设计
MPU6050姿态解算
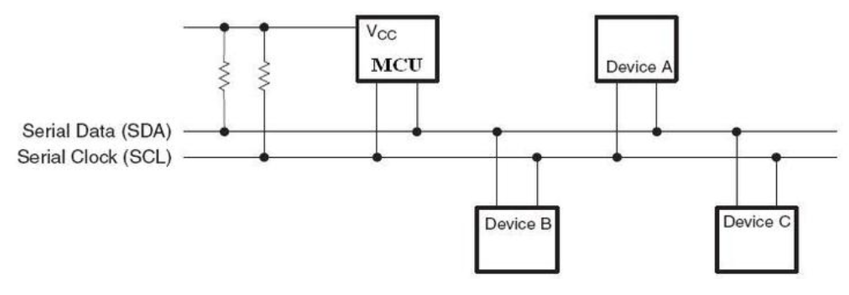
I2C通信协议
IIC 即 Inter-Integrated Circuit(集成电路总线),这种总线类型是由飞利浦半导体公司在八十年代初设计出来的,主要是用来连接整体电路(ICS) ,IIC 是一种多向控制总线,也就是说多个芯片可以连接到同一总线结构下,同时每个芯片都可以作为实时数据传输的控制源。这种方式简化了信号传输总线接口。
IIC 最初为音频和视频设备开发,如今主要在服务器管理中使用,其中包括单个组件状态的通信。例如管理员可对各个组件进行查询,以管理系统的配置或掌握组件的功能状态,如电源和系统风扇。可随时监控内存、硬盘、网络、系统温度等多个参数,增加了系统的安全性,方便了管理。
IIC 的主要构成只有两个双向的信号线,一个是数据线 SDA,一个是时钟线 SCL。MPU6050与MCU通过I2C总线进行通信,用软件模拟的方式实现 I2C 底层基本时序函数,包括起始、停止信号的产生,以及发送/接收单字节数据、检测/发送应答信号。
MPU6050原始数据读取
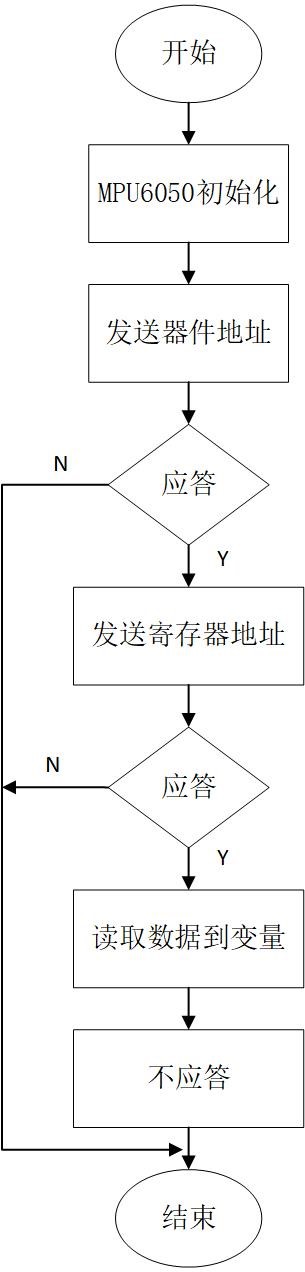
使用I2C读取MPU6050原始数据时需要将MPU6050内部寄存器恢复默认值,然后配置该模块的一些参数。根据I2C数据传输格式,读取相关寄存器,得到加速度传感器、角速度传感器和温度传感器的数据。

以读取MPU6050中某一寄存器为例,数据获取的流程图如图4-3所示。
DMP姿态解算
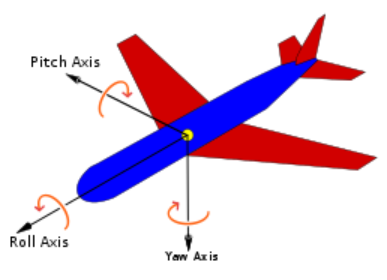
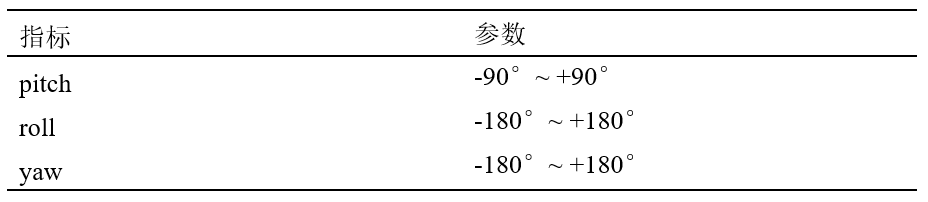
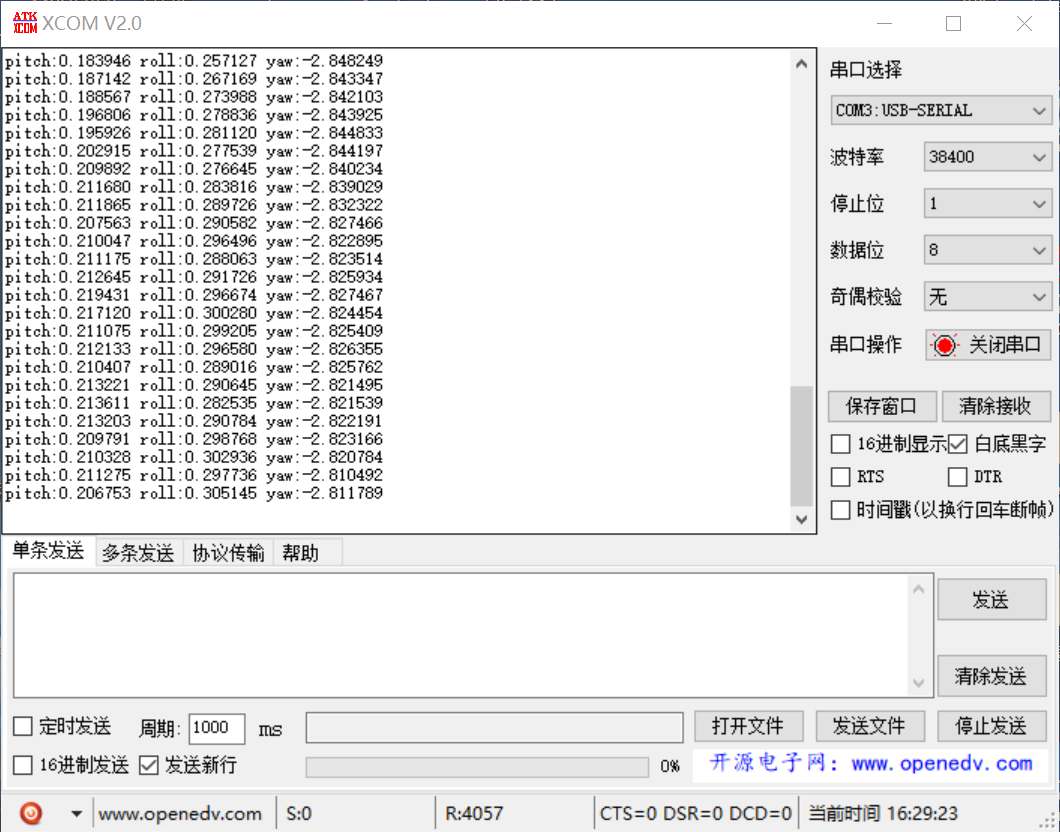
读取的MPU6050原始数据并不能直接使用,我们需要的时姿态数据即欧拉角:航向角(yaw)、横滚角(roll)、和俯仰角(pitch)。要得到欧拉角数据,需利用我们得到的原始数据,进行姿态融合解算,直接计算是比较复杂的,但MPU6050 自带了数字运动处理器 DMP,并且,InvenSense 提供了一个 MPU6050 的嵌入式运动驱动库,结合 MPU6050 的 DMP,可以将得到的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到 yaw、 roll 和 pitch。
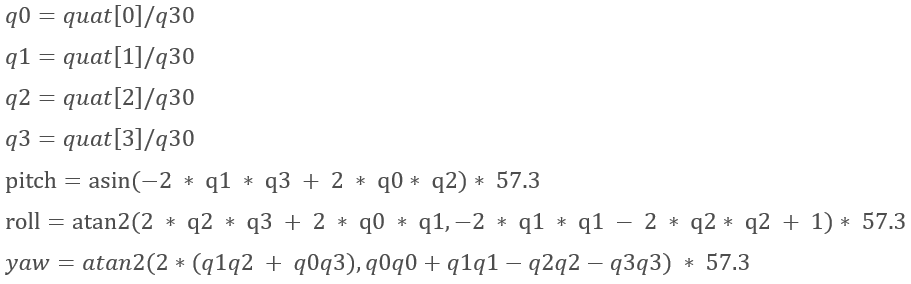
通过 MPU6050 的 DMP 输出的四元数是 q30 格式的,也就是浮点数放大了 2 的 30 次方倍。在换算成欧拉角之前,必须先将其转换为浮点数,也就是除以 2 的 30 次方,然后再进行计算,计算公式为:
姿态数据帧封装及解析
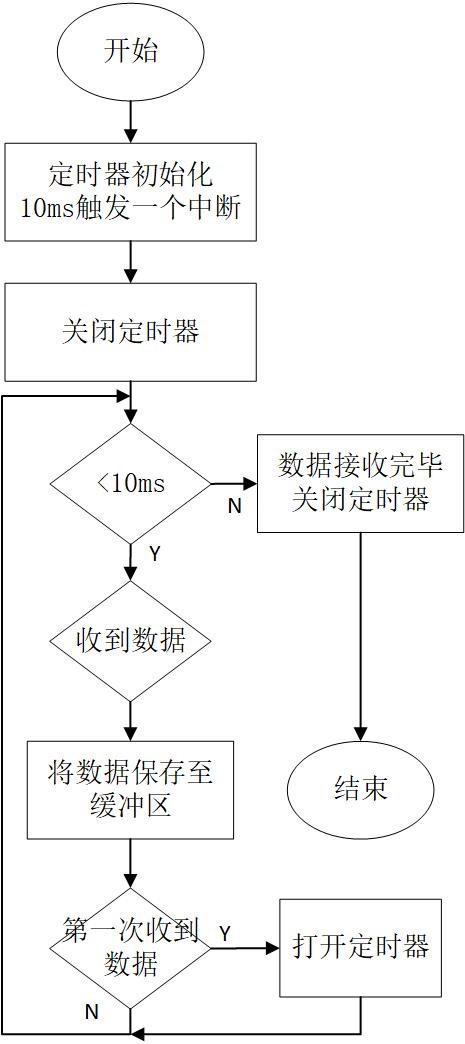
HC-05通信
HC-05蓝牙模块在接口技术上使用的是USART通信,因此我们只需要配置相应的USART即可正常的使用蓝牙模块。在本项目中我们自己制定了一个简单的数据传输协议,当两个数据接收的时间间隔大于10ms时则认为当前的一个数据款传输完毕。该协议中接收数据的流程如图4-5所示。
姿态数据封装
该项目中手带设备需要将获取的手势姿态数据通过蓝牙发送给小车。姿态数据为欧拉角,则是由航向角(yaw)、横滚角(roll)、和俯仰角(pitch)组成。因此需要将这三个数据封装成一个数据帧发送给智能小车。我们规定一个数据帧的组成如图4-6所示。
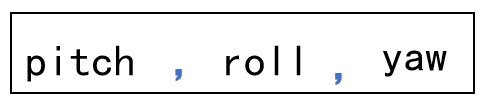
一个姿态数据由以逗号分隔的三个浮点数组成,将该数据转化为一个字符串作为姿态数据帧。
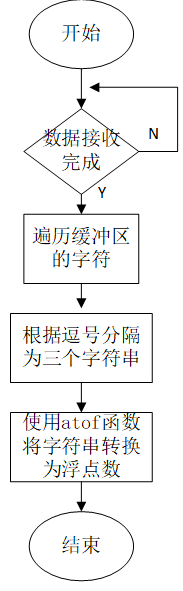
姿态数据解析
智能小车接收姿态数据帧后,需要将该数据帧进行解析,把字符串分隔三个字串,将其分别转化为浮点数保存到变量中。然后使用解析后的欧拉角来决定小车的行驶方式。该算法的流程如图4-7所示。
智能小车控制
8×8点阵LED图案显示
本次项目设计中智能小车部分的人机交互模块使用8×8点阵LED,该模块会显示小车的行驶状态。模块显示图案时需要不断的进行动态刷新,因此该功能需要使用中断的方式进行处理。
点阵模块显示的图案数据需要被存储到数组中,小车的行驶状态有:直行、后退、左转、右转、停止五种。因此点阵LED的花型至少需要五种,我们可以使用行数为五的二维数组存储花型。
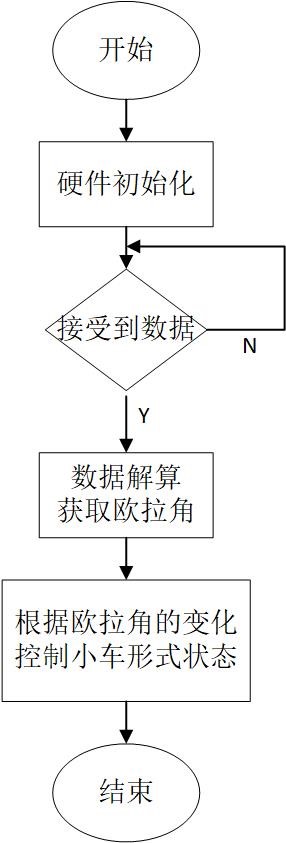
智能小车行走控制
PWM是脉冲宽度调制的简称,用于将一段信号编码为脉冲信号(一般是方波信号)。是在数字电路中达到模拟输出效果的一种手段。通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。例如一个周期内高电平10V持续二分之一的周期,则最终等效出的平均电压就为5V。本次实验使用PWM作为输出控制电机转速。
小车收到姿态数据帧并解析完毕后可以获得手带设备的欧拉角,行驶方式则跟着手带设备角度的变化而变化。该程序流程如图4-8所示。
第五章 系统测试
手带设备姿态数据获取测试
测试方案:佩戴并开启手带设备,等待MPU6050初始化完毕后,转动手腕并观察当前串口调试助手中的数值变化。尽可能幅度较大的转动以检查该设备在实际运用中的效果。
功能指标:可以正确的显示手带设备转动时的欧拉角数据。
结果分析:测试的过程中发现,有概率发生数据传送失误,明显可以看出在转动手腕时,部分数据变化幅度较大,因此可以使用软件滤波解决该问题。
手势控制小车测试
测试方案:佩戴并打开手带设备、智能小车,通过转动手腕观察小车是否按照预期行驶、以及人机交互显示模块是否可以正常显示。
功能指标:小车可以正确的根据手带设备的转动行走。
结果分析:由于使用蓝牙传输的过程中会有部分数据传送失败,因此需要将错误数据全部去除,从而到时手带设备与小车直接的数据传输有70ms左右的延迟。
参考文献
[1] STM32不完全手册_寄存器版本_V3.1
[2] STM32中文参考手册_V10